Dyno Robotics
Roboguide
Social guide robot for museums, science centers and shopping malls
my ROLE
Interaction Designer, HRI Researcher, Fascilitator, UX/UI, Motion Graphics
Timeline
3.5 years
2022-2026
project TEAM
Daniel Engelsons, Daniel Purgal, Fredrik Löfgren

Overview
Making social guide robots more approachable
Roboguide is a social guide robot used for guiding, entertainment and education in public spaces. Over 3.5 years, I helped shape its expressive behavior, client co-design process, affect-driven personality system, and product UX as it evolved from early prototype to deployed scaleable platform. The project is still ongoing, with current work focused on scaling customization and productizing the system behind the robot.
Overview
Making social guide robots more approachable
Roboguide is a social guide robot used for guiding, entertainment and education in public spaces. Over 3.5 years, I helped shape its expressive behavior, client co-design process, affect-driven personality system, and product UX as it evolved from early prototype to deployed scaleable platform. The project is still ongoing, with current work focused on scaling customization and productizing the system behind the robot.




Expression Design
Designing an expressive robot character
Roboguide needed to do more than answer questions. In public spaces, people had to quickly understand whether the robot was listening, thinking, speaking, or ready to respond. My role was to design the expressive layer that made those states visible through facial animation, speech sync, and turn-taking cues.
Objectives
Implement interaction cues that supported natural turntaking
Enable context aware emotion sequences
Make mouth sync to generated text to speech
Expression system
The robot’s face ran inside an Android app on the robot hardware. I made a library of animated facial sequences for different dialogue states and emotions, which were triggered in context and exported for real-time playback. Mouth was synced to speach by designing a fixed set of mouth positions that were ID:d through universal visemes.
Set of emotions on Elsa, the first deployed robot
Learnings from first deployment
Users struggled with differentiating natural verbal pauses in long answers from "Listening" state, causing them to frequently interrupt the robot
Users were at times unsure if the robot was hearing what they were saying
In between interactions, the robot needed idle movement to indicate readiness to talk
Changes
Progress bar to indicate how long the robot's answer was going to be, which resulted in much less frequent interruptions
We clarified how much the robot was hearing by implementing a soundwave animation that reacts to volume level
A set of idle animations, such as blinking and looking around, were set to play in random intervals to reduce stillness when no one was talking.
Curio's face animations for Doseum in San Antonio, Texas
Expression Design
Designing an expressive robot character
Roboguide needed to do more than answer questions. In public spaces, people had to quickly understand whether the robot was listening, thinking, speaking, or ready to respond. My role was to design the expressive layer that made those states visible through facial animation, speech sync, and turn-taking cues.
Objectives
Implement interaction cues that supported natural turntaking
Enable context aware emotion sequences
Make mouth sync to generated text to speech
Expression system
The robot’s face ran inside an Android app on the robot hardware. I made a library of animated facial sequences for different dialogue states and emotions, which were triggered in context and exported for real-time playback. Mouth was synced to speach by designing a fixed set of mouth positions that were ID:d through universal visemes.
Set of emotions on Elsa, the first deployed robot
Learnings from first deployment
Users struggled with differentiating natural verbal pauses in long answers from "Listening" state, causing them to frequently interrupt the robot
Users were at times unsure if the robot was hearing what they were saying
In between interactions, the robot needed idle movement to indicate readiness to talk
Changes
Progress bar to indicate how long the robot's answer was going to be, which resulted in much less frequent interruptions
We clarified how much the robot was hearing by implementing a soundwave animation that reacts to volume level
A set of idle animations, such as blinking and looking around, were set to play in random intervals to reduce stillness when no one was talking.
Curio's face animations for Doseum in San Antonio, Texas
Controlling Personality
Turning robot character into a controllable system
As Roboguide moved into more open-ended conversations, expressive animations alone were not enough to maintain a coherent character. In my master’s thesis, I explored how personality traits, narrative framing, and internal affect could be turned into a system that shaped both what the robot said and how it expressed itself.
What I explored
An internal emotion system: Shaping the robot’s reactions by what was happening in the conversation
Continuous emotion: More consistent and sequencial "moods" instead of fixed sequences
Backstory layer: Giving the robot a clearer identity rather than a generic assistant.
I added a closed loop to the system so that each interaction could shift the robot’s internal mood. That mood then shaped both the facial expression and the wording of the next response, making the character feel less static over time.

New system structure for emotional awareness
This enabled the internal emotion system to simulate continuous shifts in emotion and mood, and update the facial expressions and verbal tone accordingly. This work moved Roboguide from surface-level expression toward a more coherent character system.
The emotion system's mapping to the face expression
Results
Feeding the robot a backstory made the robot behave more like a living character. People engaged with it more curiously and personally
The system enabled automatic animation, saving time in producing each sequence by hand
The system made emotion patterns easier to tune and inspect
Controlling Personality
Turning robot character into a controllable system
As Roboguide moved into more open-ended conversations, expressive animations alone were not enough to maintain a coherent character. In my master’s thesis, I explored how personality traits, narrative framing, and internal affect could be turned into a system that shaped both what the robot said and how it expressed itself.
What I explored
An internal emotion system: Shaping the robot’s reactions by what was happening in the conversation
Continuous emotion: More consistent and sequencial "moods" instead of fixed sequences
Backstory layer: Giving the robot a clearer identity rather than a generic assistant.
I added a closed loop to the system so that each interaction could shift the robot’s internal mood. That mood then shaped both the facial expression and the wording of the next response, making the character feel less static over time.
New system structure for emotional awareness
This enabled the internal emotion system to simulate continuous shifts in emotion and mood, and update the facial expressions and verbal tone accordingly. This work moved Roboguide from surface-level expression toward a more coherent character system.
The emotion system's mapping to the face expression
Results
Feeding the robot a backstory made the robot behave more like a living character. People engaged with it more curiously and personally
The system enabled automatic animation, saving time in producing each sequence by hand
The system made emotion patterns easier to tune and inspect
Client alignment
Turning robot design into a repeatable process
Not every client needed the same robot. Different venues needed different levels of warmth, playfulness, authority, and visual identity.

Different venues need different expressions
In our first deployments i designed a a workshop-based process that helped clients define who their robot should be, and helped our team turn those decisions into a coherent implementation.

Co-design workflow with client
Positive effects
The workshop helped the clients' stakeholders align their goals with the robot within their organization
Clients could feel ownership and influence over a design that would become a core part of their venue
We as developers could learn about their customers needs from people who meet them daily
Discovered pain points
The workshops required a lot of time and resources
Decision-making during sessions was often long and inconclusive
Participants didn't always have the data or experience we needed, making it harder to pinpoint their actual needs and wants on the spot
Idea
Could I develop a tool that helps decision making and lets clients design their own robot in their own pace?
To reduce workshop overhead and make customization more accessible, I’m currently translating this process into a component-based visualization tool. The goal is to let clients explore and modify robot personality and appearance direction more directly at a detail level that suits their needs, while keeping the design system coherent.
Interface in progress to adjust and visualize foiling in real time
Interface in progress to adjust and visualize the facial interface in real time
Client alignment
Turning robot design into a repeatable process
Not every client needed the same robot. Different venues needed different levels of warmth, playfulness, authority, and visual identity.
Different venues need different expressions
In our first deployments i designed a a workshop-based process that helped clients define who their robot should be, and helped our team turn those decisions into a coherent implementation.
Co-design workflow with client
Positive effects
The workshop helped the clients' stakeholders align their goals with the robot within their organization
Clients could feel ownership and influence over a design that would become a core part of their venue
We as developers could learn about their customers needs from people who meet them daily
Discovered pain points
The workshops required a lot of time and resources
Decision-making during sessions was often long and inconclusive
Participants didn't always have the data or experience we needed, making it harder to pinpoint their actual needs and wants on the spot
Idea
Could I develop a tool that helps decision making and lets clients design their own robot in their own pace?
To reduce workshop overhead and make customization more accessible, I’m currently translating this process into a component-based visualization tool. The goal is to let clients explore and modify robot personality and appearance direction more directly at a detail level that suits their needs, while keeping the design system coherent.
Interface in progress to adjust and visualize foiling in real time
Interface in progress to adjust and visualize the facial interface in real time
Operational UX
From prototype to usable product
As Roboguide matured, the challenge expanded beyond how the robot behaved in public to how it was operated behind the scenes. I’m currently redesigning the operational interfaces to make the system feel less like a development prototype and more like a intuitive product for staff and clients.

0
1
On robot controls
Redesigning the settings and manager menus used for quick changes such as language, modes, shows, and outward behavior.

0
2
Staff-facing operations
Improving the tools used to handle the robot in day-to-day use, with clearer flows and easier introduction.

0
3
Client portal
Designing a more product-ready interface for managing content, scripts, knowledge, settings, and robot data.
The goal is not only to polish the visuals, but to make the whole platform easier to understand, operate, and scale. As the product grows across deployments, these interfaces need to support both everyday use and long-term maintenance.
What needed to change
Several tools still reflected how the system had evolved internally, rather than how staff and clients naturally expect to use it.
Different touchpoints served different users, but lacked a more coherent structure and product feel.
As more robots were deployed, configuration, content handling, and support needed to become easier and more consistent.
Current work
The on-robot manager interface is one of the first touchpoints I’m redesigning. The goal is to make quick operational tasks (such as changing language, shows, modes, and outward behavior) easier to understand and faster to perform in context.

Old interface

New Interface
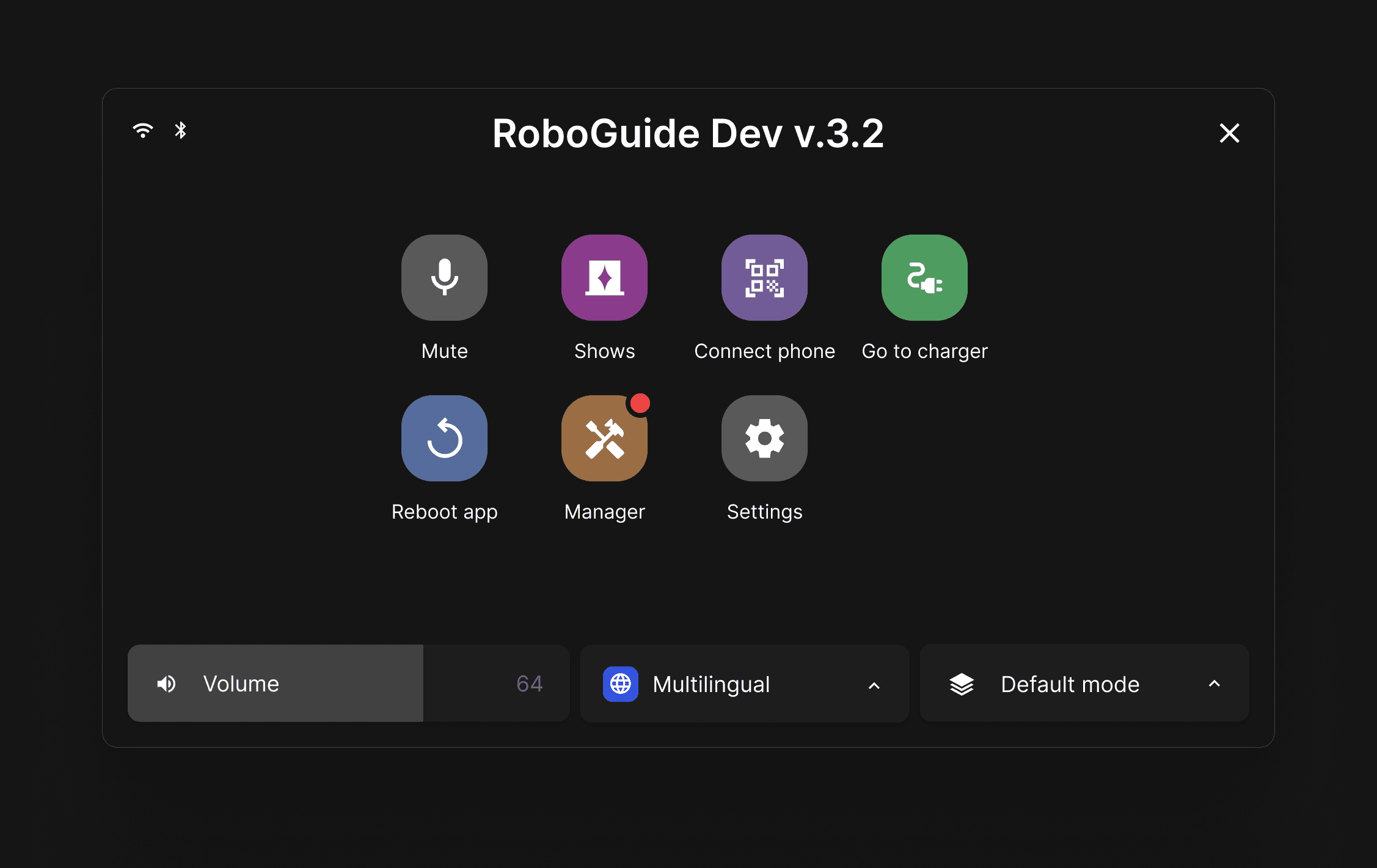
Main changes
From long, scroll-dependent interface to a single-screen overview
More recognizeable task-based actions at glance
Moved less-used controls into settings and dropdowns to reduce clutter
This phase is still in progress, but it marks an important shift in the project: from designing the robot’s behavior to designing the product ecosystem around it.
Operational UX
From prototype to usable product
As Roboguide matured, the challenge expanded beyond how the robot behaved in public to how it was operated behind the scenes. I’m currently redesigning the operational interfaces to make the system feel less like a development prototype and more like a intuitive product for staff and clients.
0
1
On robot controls
Redesigning the settings and manager menus used for quick changes such as language, modes, shows, and outward behavior.
0
2
Staff-facing operations
Improving the tools used to handle the robot in day-to-day use, with clearer flows and easier introduction.
0
3
Client portal
Designing a more product-ready interface for managing content, scripts, knowledge, settings, and robot data.
The goal is not only to polish the visuals, but to make the whole platform easier to understand, operate, and scale. As the product grows across deployments, these interfaces need to support both everyday use and long-term maintenance.
What needed to change
Several tools still reflected how the system had evolved internally, rather than how staff and clients naturally expect to use it.
Different touchpoints served different users, but lacked a more coherent structure and product feel.
As more robots were deployed, configuration, content handling, and support needed to become easier and more consistent.
Current work
The on-robot manager interface is one of the first touchpoints I’m redesigning. The goal is to make quick operational tasks (such as changing language, shows, modes, and outward behavior) easier to understand and faster to perform in context.
Old interface
New Interface
Main changes
From long, scroll-dependent interface to a single-screen overview
More recognizeable task-based actions at glance
Moved less-used controls into settings and dropdowns to reduce clutter
This phase is still in progress, but it marks an important shift in the project: from designing the robot’s behavior to designing the product ecosystem around it.
Impact
Robot as a Service
Roboguide has grown from an early expressive prototype into a deployed social robot platform used daily in public spaces. Across 3.5 years, I helped shape its character, behavior, client design process, and product direction.
So far, this work has contributed to:
7 deployed robots in Sweden and USA
Daily use in some of Sweden's biggest science centers and shopping malls
Awarded 1st place at Blooloop Innovation Awards 2025 in the Best Guest Journey Experience category
Personal takeaways
Roboguide became a strong example of how I want to work: combining interaction design, systems thinking, and product development to make emerging technology usable in the real world.
Designing the right robot required just as much stakeholder alignment and client understanding as interface and behavior design.
As the project matured, the focus shifted from just making the product functional to making the whole system operable, configurable, and scalable.
Real-world use exposed issues around timing, turn-taking, and clarity that no prototype could fully reveal.
A believable robot personality comes from how expression, behavior, and narrative support each other not from visuals alone.
Impact
Robot as a Service
Roboguide has grown from an early expressive prototype into a deployed social robot platform used daily in public spaces. Across 3.5 years, I helped shape its character, behavior, client design process, and product direction.
So far, this work has contributed to:
7 deployed robots in Sweden and USA
Daily use in some of Sweden's biggest science centers and shopping malls
Awarded 1st place at Blooloop Innovation Awards 2025 in the Best Guest Journey Experience category
Personal takeaways
Roboguide became a strong example of how I want to work: combining interaction design, systems thinking, and product development to make emerging technology usable in the real world.
Designing the right robot required just as much stakeholder alignment and client understanding as interface and behavior design.
As the project matured, the focus shifted from just making the product functional to making the whole system operable, configurable, and scalable.
Real-world use exposed issues around timing, turn-taking, and clarity that no prototype could fully reveal.
A believable robot personality comes from how expression, behavior, and narrative support each other not from visuals alone.
Previous project
Other projects
Next project