Agtech 2030
CluckBot
Prestudy concept of an autonomous robot for collecting misplaced eggs in poultry farms
my ROLE
Sole Research & Design Lead
Timeline
6 months
2023
project TEAM
Fredrik Löfgren, William Carleson

Overview
Minimizing floor eggs in poultry farms through robotics
In large-scale egg production, a significant number of eggs are laid on the floor instead of in nests, leading to poor hygiene, production losses, and physically demanding manual labor for farmers. The project addressed the challenge of reducing floor eggs in a complex, dirty, and animal-sensitive environment where existing solutions are limited or non-existent. In collaboration with Agtech and partners in egg farming industry, I led a pre-study from research to a digital prototype of how a robot might help the egg industry.
Overview
Minimizing floor eggs in poultry farms through robotics
In large-scale egg production, a significant number of eggs are laid on the floor instead of in nests, leading to poor hygiene, production losses, and physically demanding manual labor for farmers. The project addressed the challenge of reducing floor eggs in a complex, dirty, and animal-sensitive environment where existing solutions are limited or non-existent. In collaboration with Agtech and partners in egg farming industry, I led a pre-study from research to a digital prototype of how a robot might help the egg industry.



Context
The problem with floor eggs
Poultry stalls for egg production are designed to let hens both roam free and hatch eggs in a designated nest with automated egg collection. Despite this, hens commonly lay eggs on the floorbed of the stall instead of hatching in the nest. Floor eggs have to be manually picked by farmers everyday at around 6 AM, preferably directly after the hens have woken up and hatched their eggs. The eggs are often hidden or hard to reach, and affect the animal welfare if forgotten or left for too long.
Main pain points

0
1
Strenuous manual task
Picking up floor eggs manually is a time consuming and non-ergonomic task for farmers

0
2
Hygiene risks
Misplaced or hard to find eggs cause risk of disease spreading in the stall and stress among the herd

0
3
Lowered cost efficiency
Floor eggs are commonly contaminated and can't be sold, causing costly sale losses for egg farmers.
What causes floor eggs
Before treating the symptoms, it was useful to understand what the core problem we were treating was. The main cause lies in the hens habitual behaviour.
If not in the nest, hens look for dark and warm places to hatch their eggs
Hens are highly habitual beings, if not properly trained, they won't use the nests correctly
Laying eggs on the floor can also be a symptom of underlying stress in a hen, which easily spreads throughout the herd

Common view in commercial poultry farms. Swedish egg farms have stricter rules about capacity.
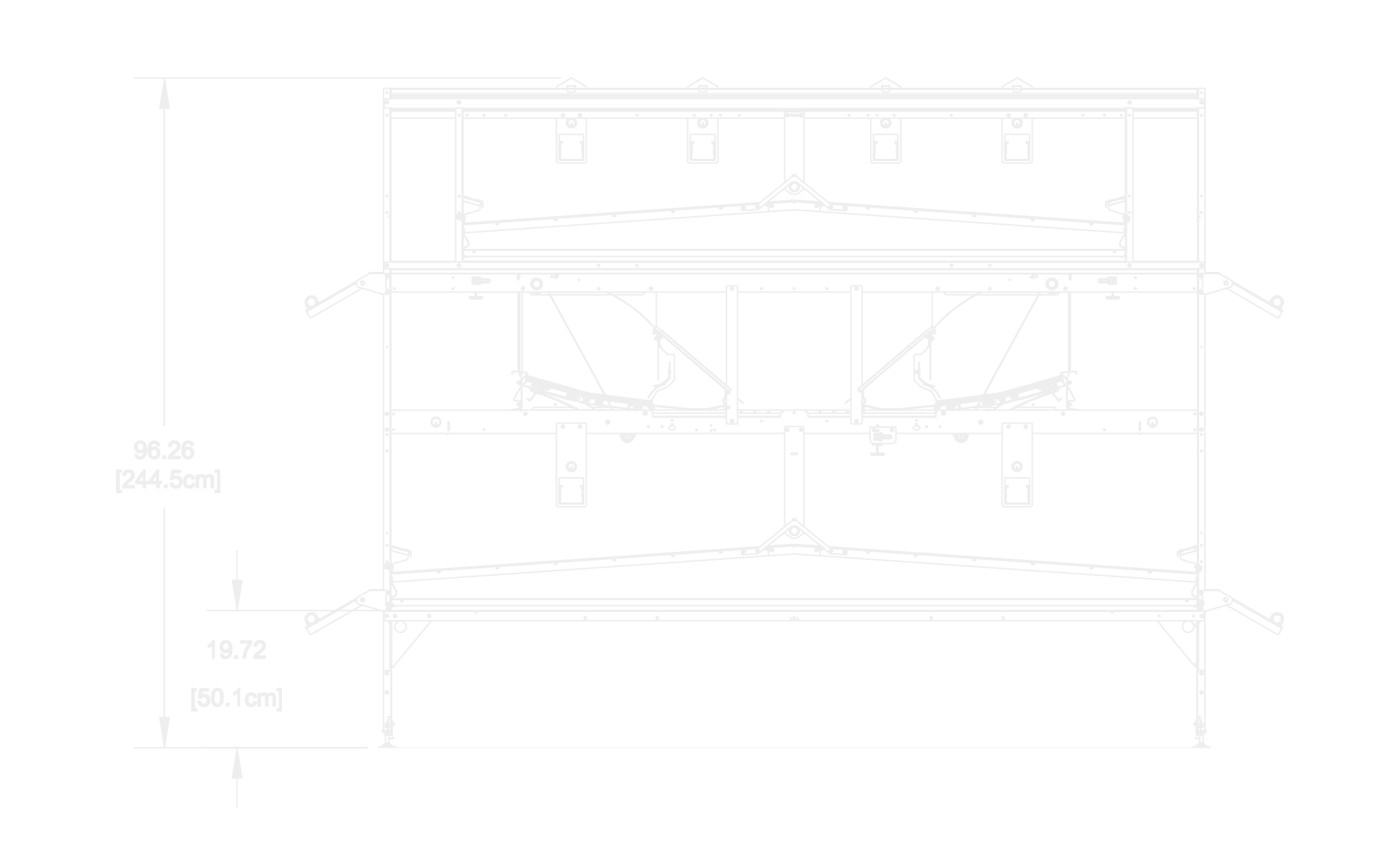
Schematic of the construction where eggs are normally collected. Hen sleep and hatch their eggs on the middle or top nest box, where eggs are caught by a conveyor belt in the middle
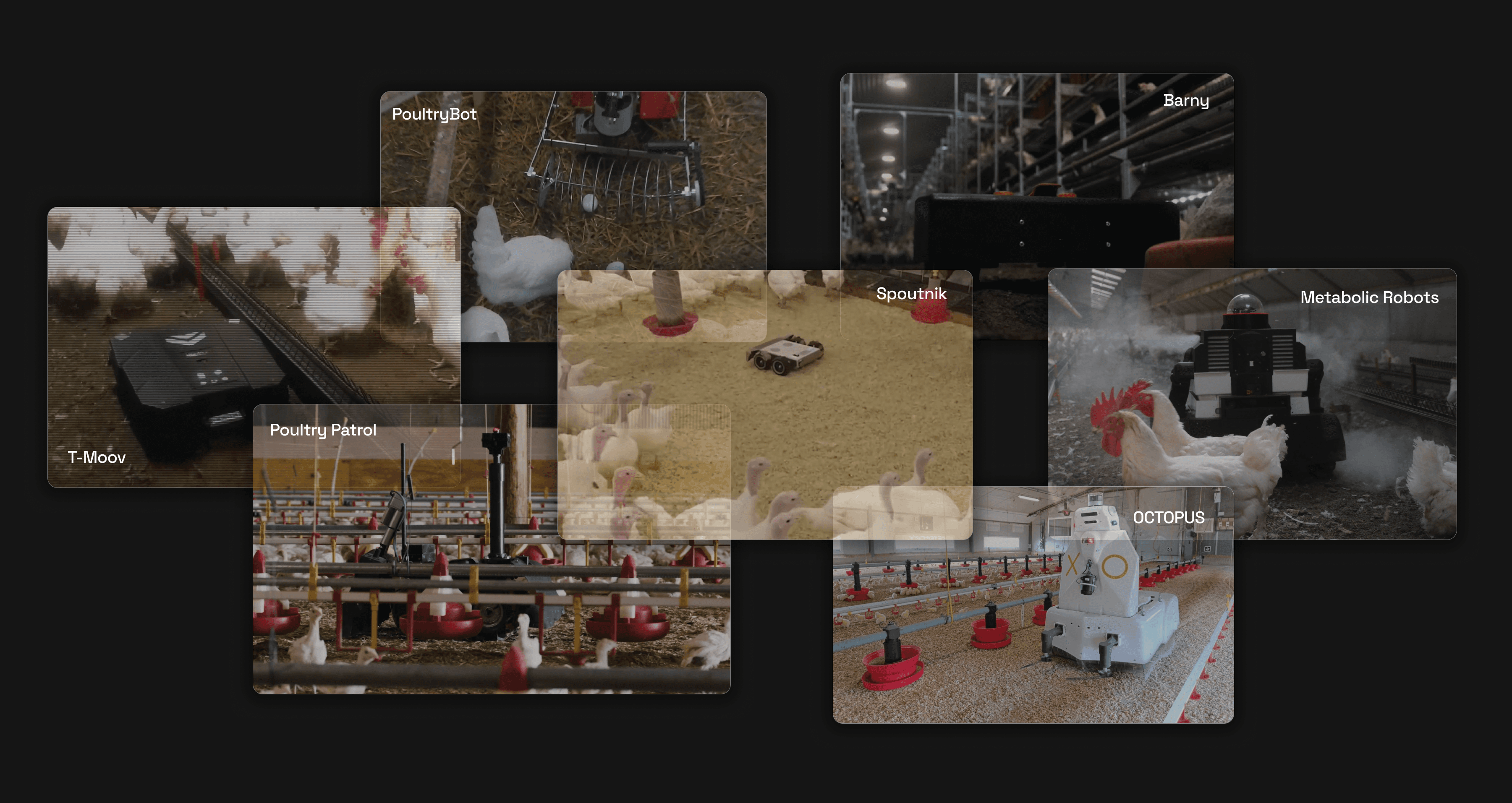
Market research of existing solutions
Research phase included scanning for existing solutions to the problem in this domain, but no functional commercial solutions for autonomous collection of eggs were found. This shaped the main challenge of the project.
Opportunity
How could a robot handle autonomous collection and prevention of floor eggs in poultry stalls?
Context
The problem with floor eggs
Poultry stalls for egg production are designed to let hens both roam free and hatch eggs in a designated nest with automated egg collection. Despite this, hens commonly lay eggs on the floorbed of the stall instead of hatching in the nest. Floor eggs have to be manually picked by farmers everyday at around 6 AM, preferably directly after the hens have woken up and hatched their eggs. The eggs are often hidden or hard to reach, and affect the animal welfare if forgotten or left for too long.
Main pain points
0
1
Strenuous manual task
Picking up floor eggs manually is a time consuming and non-ergonomic task for farmers
0
2
Hygiene risks
Misplaced or hard to find eggs cause risk of disease spreading in the stall and stress among the herd
0
3
Lowered cost efficiency
Floor eggs are commonly contaminated and can't be sold, causing costly sale losses for egg farmers.
What causes floor eggs
Before treating the symptoms, it was useful to understand what the core problem we were treating was. The main cause lies in the hens habitual behaviour.
If not in the nest, hens look for dark and warm places to hatch their eggs
Hens are highly habitual beings, if not properly trained, they won't use the nests correctly
Laying eggs on the floor can also be a symptom of underlying stress in a hen, which easily spreads throughout the herd
Common view in commercial poultry farms. Swedish egg farms have stricter rules about capacity.
Schematic of the construction where eggs are normally collected. Hen sleep and hatch their eggs on the middle or top nest box, where eggs are caught by a conveyor belt in the middle
Market research of existing solutions
Research phase included scanning for existing solutions to the problem in this domain, but no functional commercial solutions for autonomous collection of eggs were found. This shaped the main challenge of the project.
Opportunity
How could a robot handle autonomous collection and prevention of floor eggs in poultry stalls?
Requirements
Animal welfare comes first
Key requirements from the interviewed farmers and stakeholders included ability operating under existing barn furniture, handling dirty and chemically cleaned environments, navigating among moving hens, avoiding harm to animals, and collecting eggs without contamination or breakage.
Key requirements
The solution must not cause harm or stress among the hen
The retrieval method should be gentle and clean enough for eggs not to break or get contaminated
The solution must be able to navigate the dirty and unpredictable environment of a poultry stall
The retrieval method should relieve farmers from extra work
Requirements
Animal welfare comes first
Key requirements from the interviewed farmers and stakeholders included ability operating under existing barn furniture, handling dirty and chemically cleaned environments, navigating among moving hens, avoiding harm to animals, and collecting eggs without contamination or breakage.
Key requirements
The solution must not cause harm or stress among the hen
The retrieval method should be gentle and clean enough for eggs not to break or get contaminated
The solution must be able to navigate the dirty and unpredictable environment of a poultry stall
The retrieval method should relieve farmers from extra work
Concept development
Producing feasible ideas
Based on the research, I led concept generation and translated the findings into concrete robot principles. The work explored different ways of moving through the barn, picking up fragile eggs, storing them safely, and interacting with hens.





Functions and methods that drive the ideation process
Partial results of ideation workshop
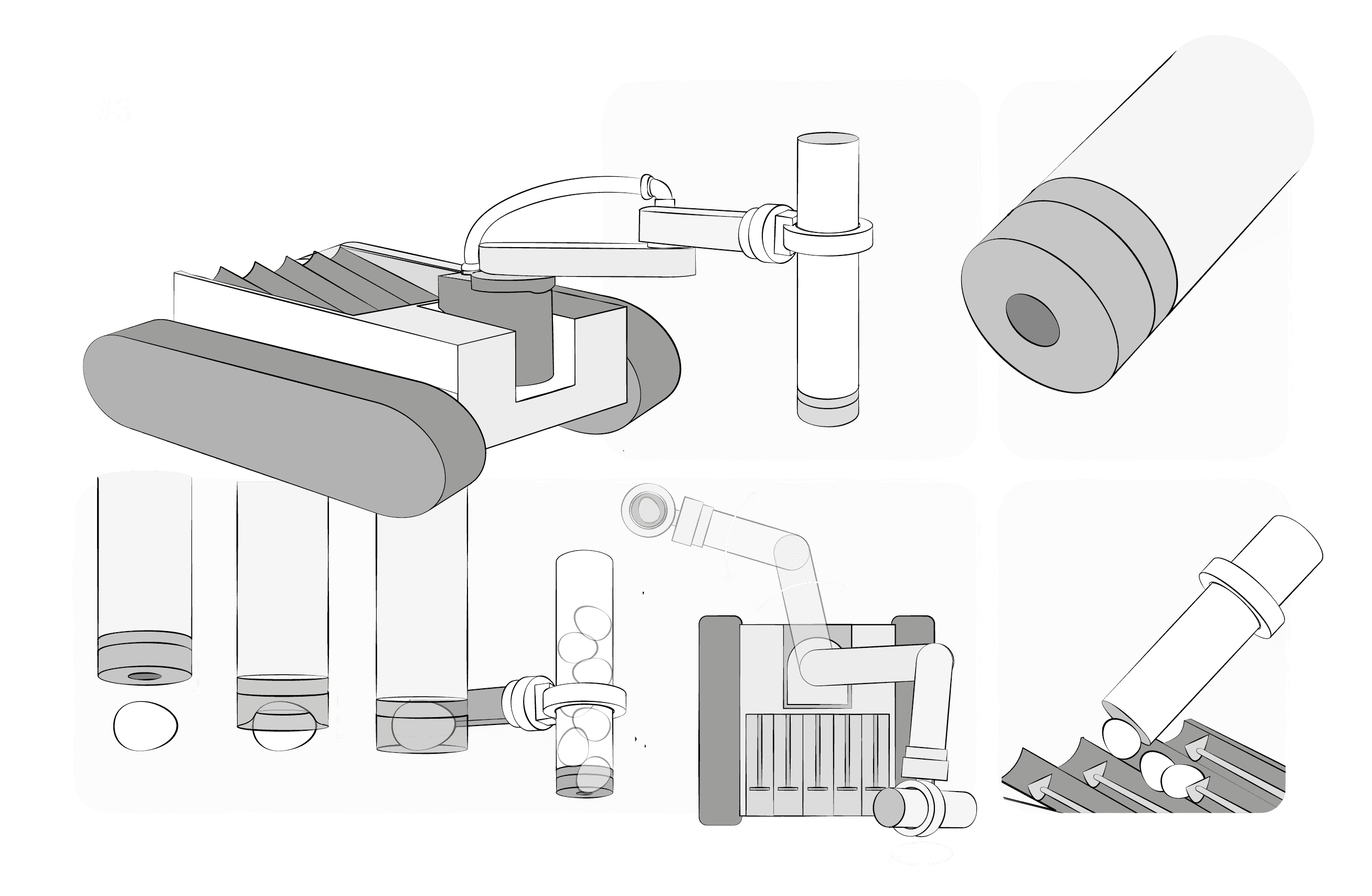
Concept suggestions
The ideation culminated in three concepts that were proposed and discussed with stakeholders. The concepts included different methods of egg retrieval, propulsion and storage solutions.
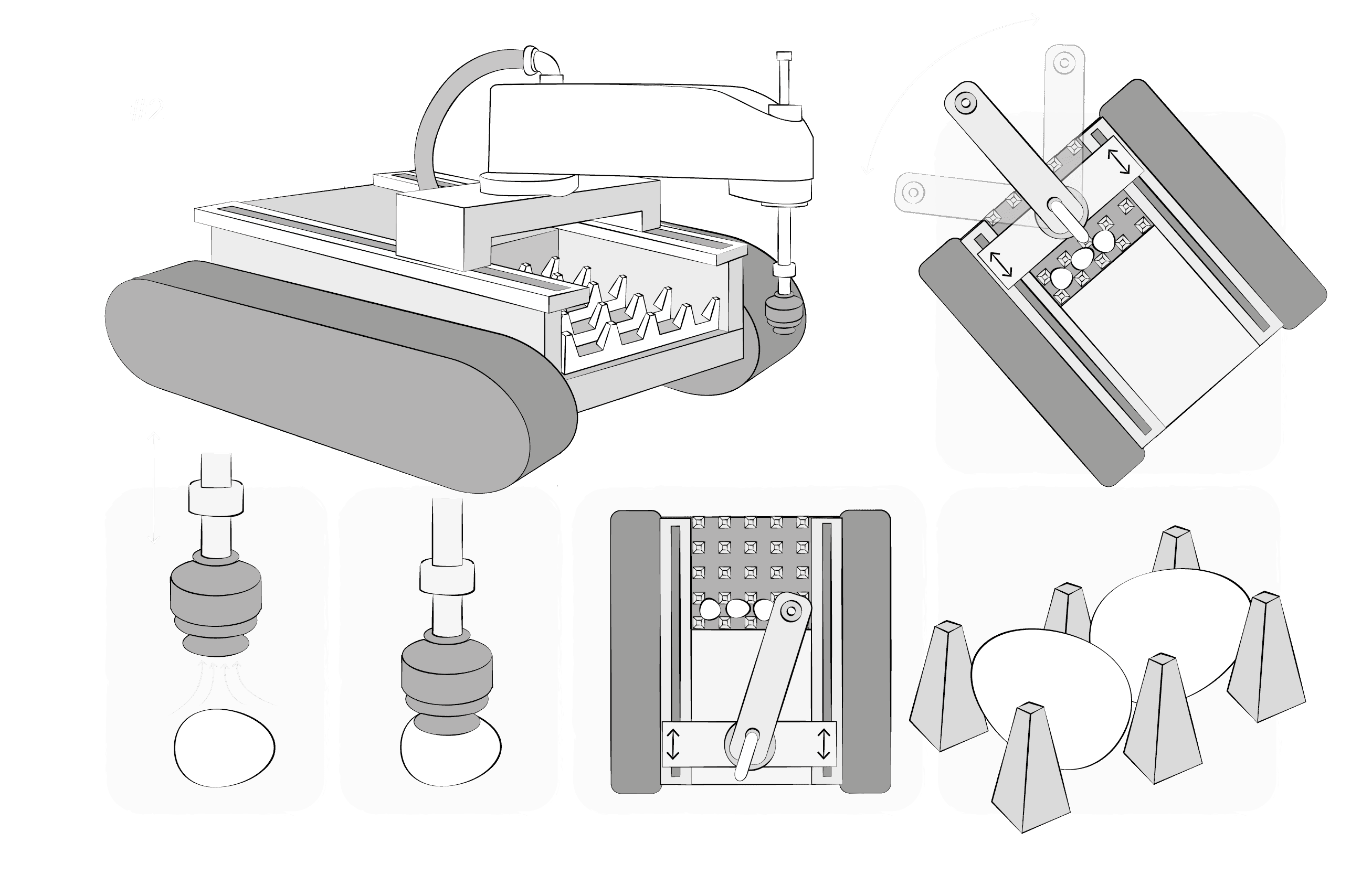
Key design decisions

0
1
Tracked propulsion
Provides lower audible noise and better navigation on the porous floor beds

0
2
Suction pickup + SCARA arm
Provides good reach, precise 2D pickup and is easier to clean. Suction provides lower risk for breakage and easier pick up confirmation

0
3
Flexible capacity
Opportunity to switch trays accomodates the varying amount of floor eggs, which differs widely from day to day or season

0
4
Preventing the problem
Possibility to gently haul hens from the floor bed during nighttime, opening the opportunity for habit-based prevention of floor eggs
Concept development
Producing feasible ideas
Based on the research, I led concept generation and translated the findings into concrete robot principles. The work explored different ways of moving through the barn, picking up fragile eggs, storing them safely, and interacting with hens.
Functions and methods that drive the ideation process
Partial results of ideation workshop
Concept suggestions
The ideation culminated in three concepts that were proposed and discussed with stakeholders. The concepts included different methods of egg retrieval, propulsion and storage solutions.
Key design decisions
0
1
Tracked propulsion
Provides lower audible noise and better navigation on the porous floor beds
0
2
Suction pickup + SCARA arm
Provides good reach, precise 2D pickup and is easier to clean. Suction provides lower risk for breakage and easier pick up confirmation
0
3
Flexible capacity
Opportunity to switch trays accomodates the varying amount of floor eggs, which differs widely from day to day or season
0
4
Preventing the problem
Possibility to gently haul hens from the floor bed during nighttime, opening the opportunity for habit-based prevention of floor eggs
Outcome
A digital prototype
The project concluded in a digital protoype and important research findings. The final concept was delivered to Agtech for further exploration.
Final digital prototype
1. Robot identifies floor egg's location

2. Arm aligns with egg position, activating suction
3. Egg is places in plastic storage tray

4. When filled, robot drives to drop-off location
5. Suction is reused for tray transport
6. Filled trays are dropped of for farmer to pick up
Learnings
Cluckbot taught me that robotics concepts need to be shaped as much by behavior, welfare, and environment as by mechanics. In this project, the key shift was reframing floor eggs as both a collection problem and a prevention problem. It also reinforced the value of grounding concept generation in explicit requirements, and of using exploration and evaluation to arrive at a more robust final direction.
The design challenge is behavioral as much as technical.
Animal welfare and hygiene had to be treated as design constraints, not afterthoughts
Early requirement-setting made concept evaluation much stronger
The most valuable outcome was not only the concept itself, but knowing what had to be tested next.
Outcome
A digital prototype
The project concluded in a digital protoype and important research findings. The final concept was delivered to Agtech for further exploration.
Final digital prototype
1. Robot identifies floor egg's location
2. Arm aligns with egg position, activating suction
3. Egg is places in plastic storage tray
4. When filled, robot drives to drop-off location
5. Suction is reused for tray transport
6. Filled trays are dropped of for farmer to pick up
Learnings
Cluckbot taught me that robotics concepts need to be shaped as much by behavior, welfare, and environment as by mechanics. In this project, the key shift was reframing floor eggs as both a collection problem and a prevention problem. It also reinforced the value of grounding concept generation in explicit requirements, and of using exploration and evaluation to arrive at a more robust final direction.
The design challenge is behavioral as much as technical.
Animal welfare and hygiene had to be treated as design constraints, not afterthoughts
Early requirement-setting made concept evaluation much stronger
The most valuable outcome was not only the concept itself, but knowing what had to be tested next.
Previous project
Other projects
Next project